PID controller
To the PID controller there is not much to say. See here.
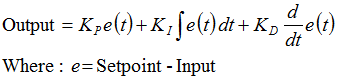
The SW implementation is also straight forward. Here you find a cool blog about it.
The implementation could look like this.
void setPIDFactors()
{
kpr = 0.5; //PID constants for for roll angle
kir = 0.01;
kdr = 2.0;
kpp = 0.5; //PID constants for pitch angle
kip = 0.01;
kdp = 2.0;
kpy = 1.0; //PID constants for yaw angle
kiy = 0;
kdy = 0;
sampleFrequency = 333; //sample update rate of the MPU9250
}
void ComputePIDRoll()
{
errorR = 100 * (-setRoll - roll); //in this application the setRoll has to be negated; depends on the orientation matrix of the MPU9250
errSumR = errSumR + errorR / sampleFrequency;
if (errSumR * kir > 1000)
{
errSumRWatch = 1000;
}
else if (errSumR * kir < -1000)
{
errSumRWatch = -1000;
}
else errSumRWatch = errSumR;
dErrR = errorR - lastErrR;
outputR[0] = outputR[1]; //we build an average output over 5 samples; [5] holds the average value
outputR[1] = outputR[2];
outputR[2] = outputR[3];
outputR[3] = outputR[4];
outputR[4] = (kpr / 10.0 * errorR) + (kir * errSumR) + (kdr * dErrR);
outputR[5] = (outputR[0] + outputR[1] + outputR[2] + outputR[3] + outputR[4]) / 5; //
lastErrR = errorR;
}
Pich and Yaw use a similar PID controller function.